
![]()
ros_sgp_tools
The ros_sgp_tools package provides a ROS2 companion package for the SGP-Tools python library that can be deployed on ArduPilot-based vehicles.
- The package can be used to run online/adaptive IPP on ArduPilot based UGVs and ASVs.
- The package can also be used with Gazebo/Ardupilot SITL.
- To use our Docker container with the preconfigured development environment, please refer to the documentation here.

Running SGP-Tools Online/Adaptive IPP with Gazebo/ArduRover Simulator
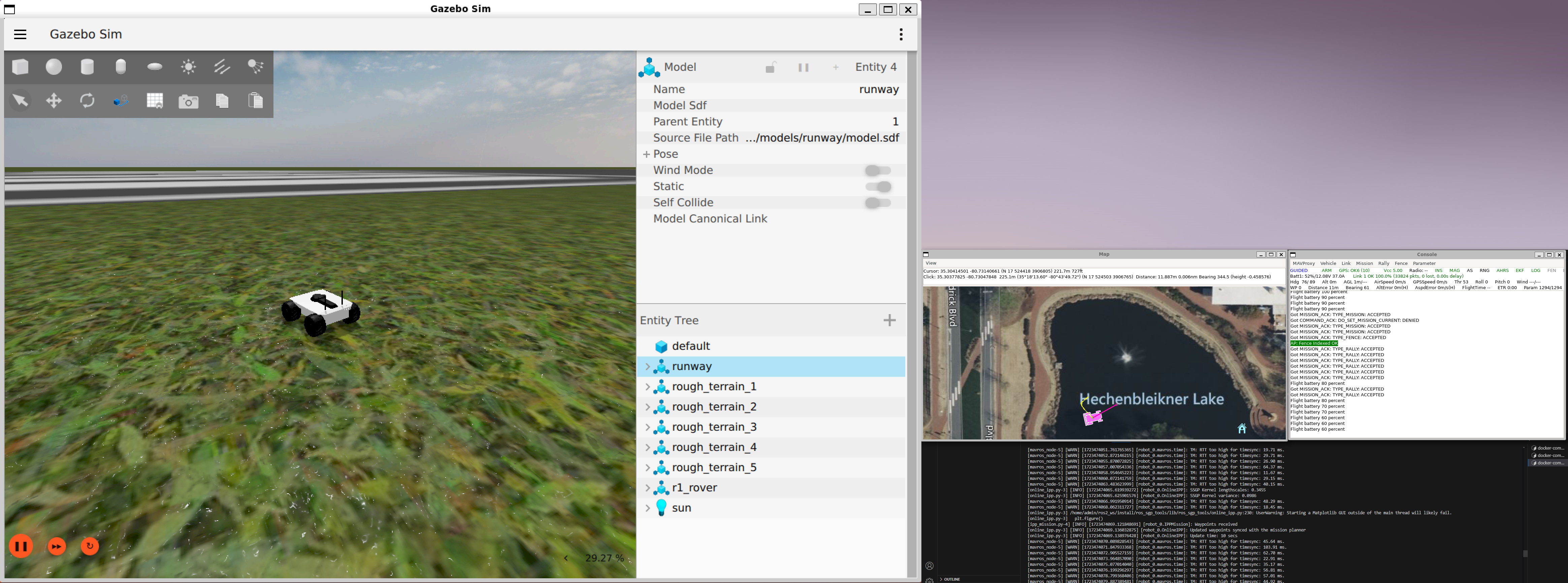
Run the following commands in separate terminals:
-
Launch Gazebo with the AION R1 UGV:
To simulate a BlueBoat refer to this documentation. -
Launch ArduRover SITL:
Note:sim_vehicle.py -v Rover -f rover-skid --model JSON --add-param-file=$HOME/SITL_Models/Gazebo/config/r1_rover.param --console --map -N -l 35.30371178789218,-80.73099267294185,0.,0.- Restart sim_vechile.py if you get the following message:
paramftp: bad count - Ensure the MAV Console shows that the vehicle has a GPS lock before running the next command
- Ensure the MAV Map shows the vehicle before running the next command
- Restart sim_vechile.py if you get the following message:
-
Launch the SGP-Tools Online/Adaptive IPP method:
Environment setup
- To use our Docker container with the preconfigured development environment, please refer to the documentation here.
Alternatively, please follow the following instructions to configure the development envirnoment on your local machine.
- Install ROS 2 Humble
- Create a ROS 2 workspace
- Install Gazebo Garden
- Install ArduPilot SITL
- Install ardupilot_gazebo
- Get SITL_Models repo
- Setup environment variables
echo "export GZ_VERSION=garden" >> ~/.bashrc
echo "export GZ_SIM_SYSTEM_PLUGIN_PATH=$HOME/ardupilot_gazebo/build:${GZ_SIM_SYSTEM_PLUGIN_PATH}" >> ~/.bashrc
echo "export GZ_SIM_RESOURCE_PATH=$HOME/ardupilot_gazebo/models:$HOME/ardupilot_gazebo/worlds:$HOME/SITL_Models/Gazebo/models:$HOME/SITL_Models/Gazebo/worlds:$GZ_SIM_RESOURCE_PATH" >> ~/.bashrc
Package setup
- Install apt dependencies
- Install pip dependencies
- Clone repo and build package