
![]()
docker-sgp-tools
The docker-sgp-tools package provides the following docker-compose scripts:
robot-compose.yml: A minimal docker container used to run SGP-Tools ROS2 package on ArduPilot-based robots.sitl-compose.yml: A GUI-based docker container with ROS2, Gazebo, ArduPilot SITL, and SGP-Tools used for simulating ArduPilot vehicles and testing SGP-Tools IPP code.

Prerequisites
- docker
- docker-compose
- (Optional) WSLg
Getting Started
Starting the Containers
Run the following commands to start the SITL docker container:
git clone --recurse-submodules https://github.com/itskalvik/docker-sgp-tools.git
cd docker-sgp-tools
docker-compose -f sitl-compose.yml pull
docker-compose -f sitl-compose.yml up -d
docker-compose -f sitl-compose.yml exec sgptools bash
Use robot-compose.yml to run the minimal docker container.
Running SGP-Tools Online/Adaptive IPP with Gazebo/ArduRover Simulator
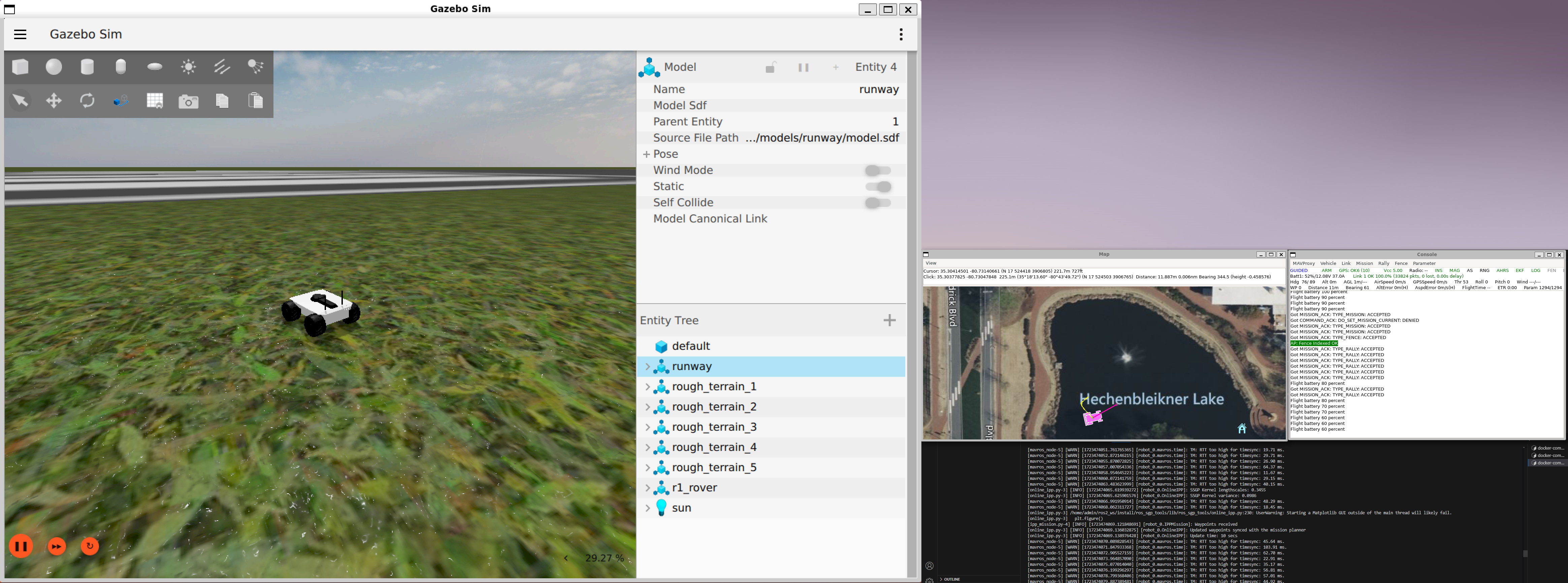
Use docker-compose -f sitl-compose.yml exec sgptools bash to get a new terminal. Run the following commands in separate terminals in the docker container:
-
Launch Gazebo with the AION R1 UGV:
To simulate a BlueBoat refer to this documentation. Note that the container already has Wave Sim installed in it. -
Launch ArduRover SITL:
Note: Restart sim_vechile.py if you get the following message:sim_vehicle.py -v Rover -f rover-skid --model JSON --add-param-file=$HOME/SITL_Models/Gazebo/config/r1_rover.param --console --map -N -l 35.30371178789218,-80.73099267294185,0.,0.paramftp: bad count 1294 should be 1284 -
Launch the SGP-Tools Online/Adaptive IPP method:
Building the Docker Containers from Scratch
First, setup buildx to build the containers for both arm64 and amd64 platforms:
docker buildx create --name multi-arch \
--platform "linux/arm64,linux/amd64" \
--driver "docker-container"
docker buildx use multi-arch
Next, clone the repo and build the container.
git clone --recurse-submodules https://github.com/itskalvik/docker-sgp-tools.git
cd docker-sgp-tools
docker-compose -f sitl-compose.yml build
Use robot-compose.yml to build the minimal docker container.
Other commands
-
The docker-compose down command stops and removes containers, networks, volumes, and images, making it suitable for completely clearing all resources deployed by an application.
-
The docker-compose stop command just pauses running containers without removing them, which is ideal for temporary halts.
References
Based on Dockerfiles from the following repos:
- https://github.com/Robotic-Decision-Making-Lab/blue
- https://github.com/ryomo/ros2-gazebo-docker