About Me
My research lies at the intersection of machine learning and robotics, with a focus on approximate inference (Bayesian learning) and path planning. Currently, I am investigating sparse Gaussian processes to tackle critical issues in robotics. These include generating explainable DNN predictions, sensor placement, multi-robot informative path planning, and robot motion planning.
Interests
- Bayesian Learning
- Approximate Inference
- Path Planning
Education
PhD in Computer Science
University of North Carolina at Charlotte
MSc in Computer Science
University of North Carolina at Charlotte
BSc in Computer Science
Wichita State University
Featured Publications
Featured Projects


Recent Posts
Recent Publications
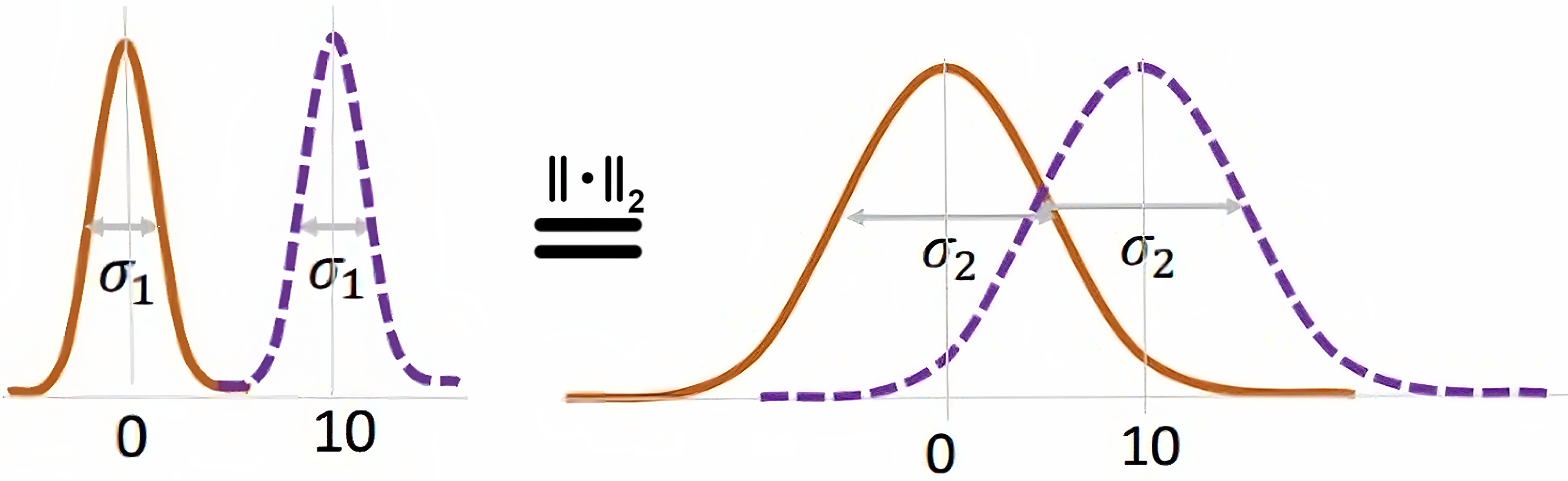
Efficient Sensor Placement from Regression with Sparse Gaussian Processes in Continuous and Discrete Spaces.
In CoRR 2023.
GaitSADA: Self-Aligned Domain Adaptation for mmWave Gait Recognition.
In IEEE MASS 2023.
Bayesian Sensor Placement for Multi-source Localization of Viruses in Wastewater Networks.
In CoRR 2022.
Probabilistic Gas Leak Rate Estimation using Submodular Function Maximization with Routing Constraints.
In IEEE RA-L 2022.
Deep Gaussian Processes: A Survey.
In CoRR 2021.